Static and dynamic operation
Applications are classified as static or dynamic according to whether the working point in the second quadrant of the hysteresis loop is fixed or moving (Fig. 1). The position of the working point reflects the internal field Hm, which depends in turn on the magnet shape, airgap and any fields that may be generated by electric currents. The working point changes whenever magnets move relative to each other, when the airgap changes or when time-varying currents are present. On account of their square loops, oriented ferrite and rareearth magnets are particularly well suited for dynamic applications that involve changing flux density. Ferrites and bonded metallic magnets also minimize eddy-current losses.
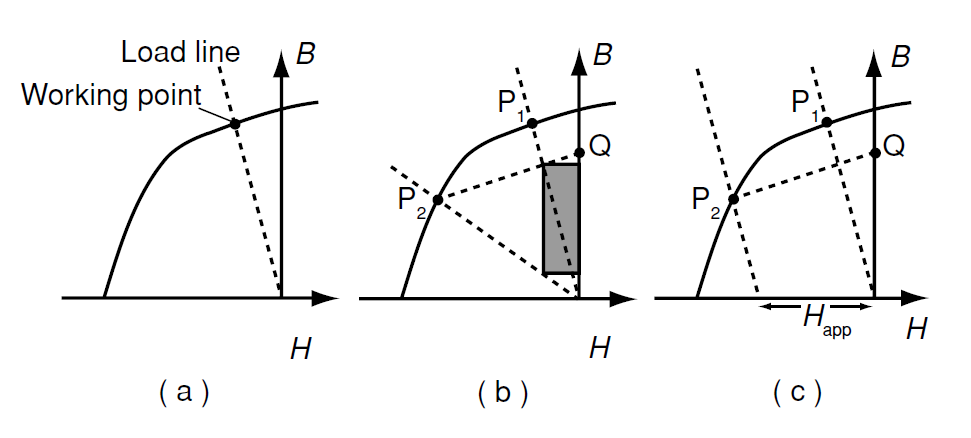
Figure 1: Hysteresis loops showing working points for: (a) a static application, (b) a dynamic application with mechanical recoil and (c) a dynamic application with active recoil.
For mechanical recoil, the airgap changes from a narrow one with reluctance R1 to a wider one with greater reluctance R2. After several cycles, the working point follows a stable trajectory, represented by the line P2Q in Fig. 1(b) whose slope is known as the recoil permeability μR. Recoil permeability is 2–6 μ0 for alnicos, but it is barely greater than μ0 for oriented ferrite and rare-earth magnets. The shaded area in Fig. 1(b) is a measure of the useful recoil energy in the gap, the recoil product (BH)u, which will always be less than (BH)max , but approaches this limit in materials with a broad square loop and a recoil permeability close to μ0.
Active recoil occurs in motors and other devices where the magnets are subject to an H-field during operation as a result of currents in the copper windings. The field is greatest at startup, or in the stalled condition. Active recoil involves displacement of the permeance line along the H-axis.





















